一、直接转矩控制系统的建模
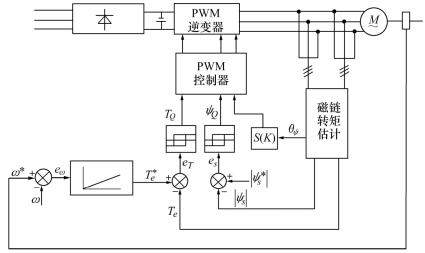
保利得电机厂根据前面定子磁链、转矩控制的原理,可得到直接转矩控制系统的组成,如图1所示。
图1:异步电机直接转矩控制系统原理图
根据图1应用MATLAB/SIMULINK的电力系统
工具箱等搭建实验系统,再根据直接转矩控制的实现过程,用S函数模块以转矩、磁链控制信号和磁链所在扇区作为输入(假设是逆时针旋转),通过编程实现产生PWM开关控制信号,实现控制目的。
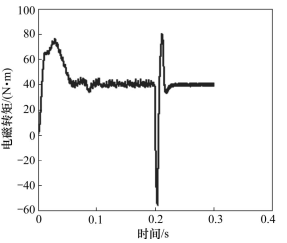
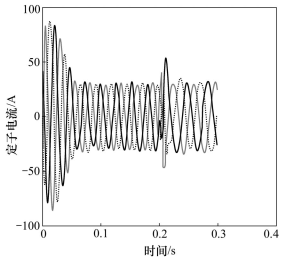
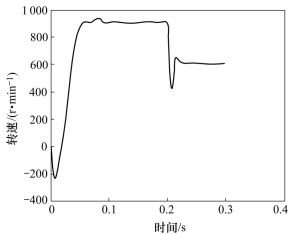
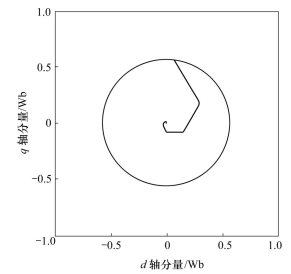
参数设置:三相异步电机,额定功率5kW,额定电压380V,额定频率50Hz,定子电阻0.435Ω,定子电感2.0mH,转子电阻0.816Ω,转子电感2.0mH,定转子互感69.31mH,转动惯量0.0049kg_m2,摩擦系数为0,磁极对数为2;直流输入电压为220V,电机负载为40Nm,电机转速在0.2s时从900r/min降为600r/min。仿真波形如图2~5所示。仿真结果表明:三相异步电机的电磁转矩响应快,鲁棒性好,在转速变化时,经过很短时间的调整,达到比较稳定的状态;三相定子电流和环球电机转速也比较稳定,在转速变化时,经短时调整,便基本稳定下来;定子磁链轨迹为圆形,控制效果较理想。因此,实验验证了直接转矩控制的可行性和优越性。但是转矩有一定的波动。
图2:三相异步电机的电磁转矩
图3:三相定子电流
图4:电机的转速响应
图5:定子磁链波形
二、直接转矩控制系统的改进
将转矩控制改为三电平控制,如图6所示。TQ=l时需增大转矩;TQ=0时需缓慢减小转矩;TQ=-1时需快速减小转矩。可以推出逆时针旋转时逆变器所需的开关组合矢量表,如表1所示。编制新的S函数,仿真表明电磁转矩可得到一定改善。
图6:转矩滞环调节器
表1:直接转矩控制系统优化开关表
SQ TQ 1 2 3 4 5 6
1 1 u2(110) u3(010) u4(011) u5(001) u6(101) u1(100)
0 u7(111) u0(000) u7(111) u0(000) u7(111) u0(000)
-1 u6(101) u1(100) u2(110) u3(010) u4(011) u5(001)
1 1 u3(010) u4(011) u5(001) u6(101) u1(100) U2(110)
0 u0(000) u7(111) u0(000) u7(111) u0(000) u7(111)
-1 u5(001) u6(101) u1(100) u2(110) u3(010) u4(011)
三、结论
直接转矩控制是一项高性能的东莞电机调速新技术,它能使电机的转矩和定子磁链得到较好的控制,进一步细分转矩的控制电平,可以减少转矩的脉动。今后将做进一步研究。

 在线客服1号
在线客服1号